Maurizio Petrarca (Movement Analysis and Robotics laboratory (MARlab), Bambino Gesù Children’s Hospital, IRCCS, Rome Italy)
Martina Favetta (Movement Analysis and Robotics laboratory (MARlab), Bambino Gesù Children’s Hospital, IRCCS, Rome Italy(
Azzurra Speroni (Movement Analysis and Robotics laboratory (MARlab), Bambino Gesù Children’s Hospital, IRCCS, Rome Italy)
Iacopo lovalè (Movement Analysis and Robotics laboratory (MARlab), Bambino Gesù Children’s Hospital, IRCCS, Rome Italy)
Paolo Tavassi (Movement Analysis and Robotics laboratory (MARlab), Bambino Gesù Children’s Hospital, IRCCS, Rome Italy)
Gessica Della Bella (Movement Analysis and Robotics laboratory (MARlab), Bambino Gesù Children’s Hospital, IRCCS, Rome Italy)
Donatella Lettori (Movement Analysis and Robotics laboratory (MARlab), Bambino Gesù Children’s Hospital, IRCCS, Rome Italy)
In the control of the interactions between the body and the ground, the control variable is the Centre of Pressure (CoP), while the controlled variable is the Centre of Mass (CoM) [1]. In other words, variations in the centre of pressure on the ground govern the movement of the body’s centre of mass. However, this depends on the task and context. The redundancy of the organism’s dynamic solutions allows this role to be reversed [2]. But what are the differences in individuals with CNS pathologies?
It is necessary to analyse other variables: the ground reaction vector and electromyography. In this initial phase of the study, we proceeded using a graphical method. We graphed, using MATLAB (USA), the displacement of the CoP, and the displacement of the CoM along with the ground reaction vector in healthy subjects and people with neurological pathologies using data from the VICON system (UK).
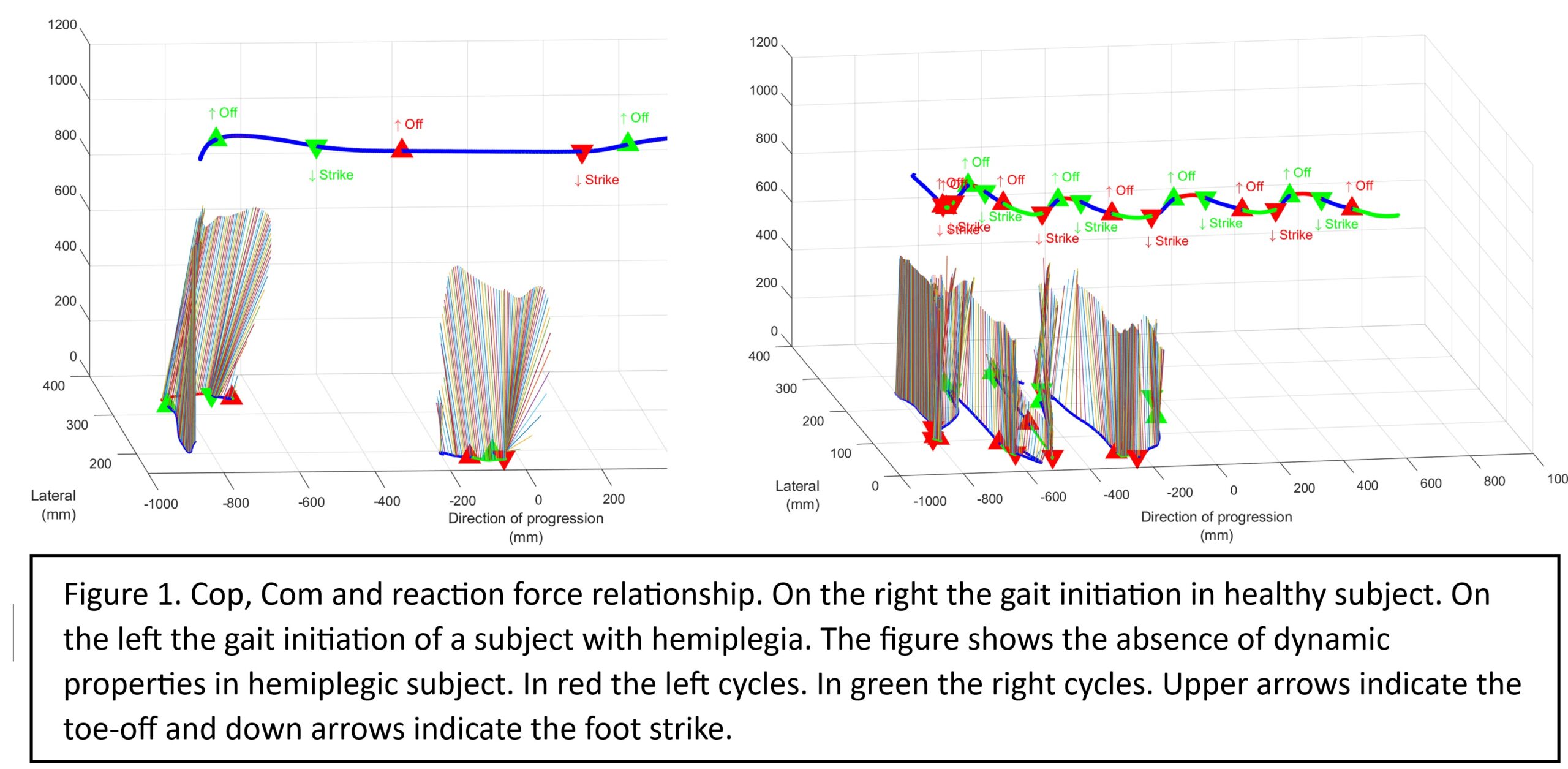
The longitudinal projection of the ground reaction vector is well-known in walking, but much information is contained in the other two projections. The Centre of mass is directed towards the contralateral side from a push of the hindfoot of the leg that is about to swing. The CoM is simultaneously accelerated forward. To govern this trajectory, the CoP transfers under the supporting foot while the ground reaction vector continues to point at the CoM, until the double support phase when the control is transferred to the contralateral leg. Dynamically speaking, the CoM is never outside the base of support but is constantly controlled by the dynamic pushes exerted by the ground reaction vector. Co-activation of lower limb muscles responsible for the initial push is observed. The movement initiation is determined by their resultant, leading to a push on the ground with the hindfoot. In hemiplegic patients, a lack of push and load transfer is observed, CoM variations are used to keep the CoP within the base of support, contrary to healthy individuals [3]. (Figure 1) The hemiplegic who cannot implement this alternative solution is the one who does not walk.
In conclusion, load transfer is an alternative solution for governing the upright stance immediately available when is no longer feasible the dynamic push strategy. This alternative is immediately available thanks to the redundancy of the organism’s dynamic solutions. Practising load transfer is a training activity for a pathological condition that should be conducted after verifying that there are no conditions for restoring dynamic function.
[1] P. G. Morasso, G. Spada, R. Capra. Human Movement Science. doi.org/10.1016/S0167-9457(99)00039-1
[2] J. P. Scholz et al. Exp Brain Res. doi: 10.1007/s00221-006-0848-1
[3] M. Petrarca. In book: Progress in Motor Control, Springer, DOI:10.1016/B978-0-443-23987-8.00001-8