Filippi Luca (Neurorehabilitation Unit, University Hospital of Verona, Italy)
Righetti Anna (Neuromotor and Cognitive Rehabilitation Research Center – Department of Neurosciences, Biomedicine and Movement Sciences, University of Verona, Italy)
Cengiarotti Nicolò (Neuromotor and Cognitive Rehabilitation Research Center – Department of Neurosciences, Biomedicine and Movement Sciences, University of Verona, Italy)
Varalta Valentina (Neuromotor and Cognitive Rehabilitation Research Center – Department of Neurosciences, Biomedicine and Movement Sciences, University of Verona, Italy)
Picelli Alessandro (Neuromotor and Cognitive Rehabilitation Research Center – Department of Neurosciences, Biomedicine and Movement Sciences, University of Verona, Italy)
Valè Nicola (Brain Navigation Lab – Department of Engineering for Innovation Medicine, University of Verona, Italy)
Smania Nicola (Neuromotor and Cognitive Rehabilitation Research Center – Department of Neurosciences, Biomedicine and Movement Sciences, University of Verona, Italy)
Upper limb (UL) state estimation is thought to be the result of a Bayesian optimal dynamic integration of feedforward motor control and proprioceptive information. The forward models (FMs) influence on UL state estimation has mainly been studied in a planar space, during constrained UL movements, often using a robotic manipulandum. However, performing motor tasks in a natural, unconstrained, three-dimensional (3D) space should be characterized by much more complex sensorimotor processes, making the generalization of these previous studies uncertain. A cross-sectional study was designed with the aim of investigating whether FMs output improves the accuracy of the UL state estimation in a 3D space during natural, unconstrained pointing movements.
Healthy volunteers were enrolled and asked to perform a one-arm position-matching (PM) task with their dominant UL. Index fingertip position (Fig. 1) was measured using an 8-camera optoelectronic Vicon motion capture system. All subjects performed a total of 99 PM trials with eyes closed in three different conditions: the Self-Condition (SC), the Movement Condition (MC) and the External Perturbed Condition (EPC). In the SC subjects were asked to choose a target position in the 3D space in front of them, point to it, and after 7 s of rest, match that position. In the MC the participants were unpredictably asked, while reaching the target position, to perform a voluntary movement (altering the target position) and then match that final target position. Finally the EPC was identical to the SC, but a variable external weight was attached to the participants’ wrist during the target movement. The PM accuracy was assessed as the absolute distance between the target and the matching position.
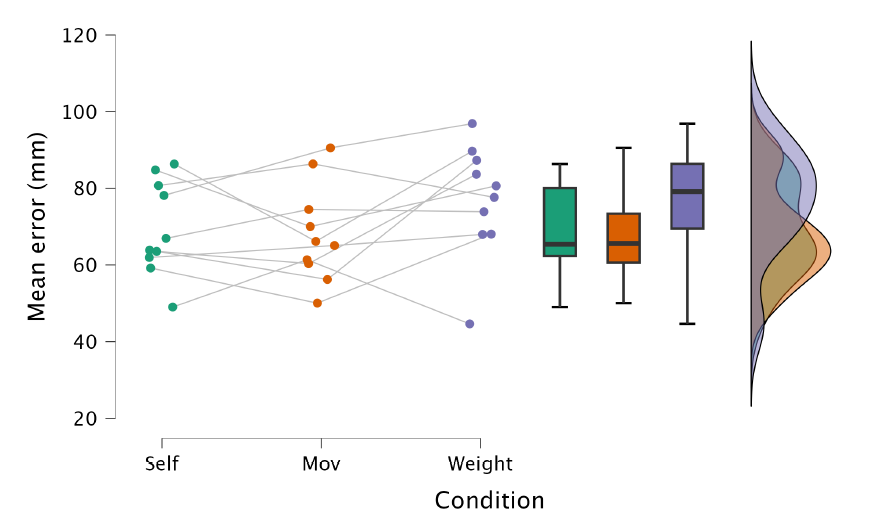
A convenient sample of 10 healthy subjects (2 males and 8 females, 30.6 ± 4.3 years old) was recruited for this preliminary investigation. For each subject and each condition, the mean absolute distance between the target and matching position was computed. Then, a repeated measure ANOVA was performed to assess the effect of condition. Preliminary results might suggest a decreasing accuracy of UL state estimation in the EPC (Repeated Measure ANOVA, p = 0.07), with a trend towards a statistically significant contribution (Fig. 2) of FMs to UL state estimation. In the next weeks, we will increase the sample to confirm these findings.
These preliminary results suggest that FMs may contribute to the position estimation of the UL during active, natural, unconstrained movements in 3D space. FMs seem to show accurate adaptability to voluntary hand perturbations during movement (MC), but their prediction fails if arm dynamic is externally altered (EPC). The future aim is to confirm these preliminary results expanding the sample.
Ariff, G., Donchin, O., Nanayakkara, T., & Shadmehr, R. (2002). A real-time state predictor in motor control: Study of saccadic eye movements during unseen reaching movements. Journal of Neuroscience, 22(17), 7721–7729.
Berniker, M., & Kording, K. (2011). Bayesian approaches to sensory integration for motor control. Wiley Interdisciplinary Reviews: Cognitive Science, 2(4), 419–428.
Desmurget, M., Jordan, M., Prablanc, C., & Jeannerod, M. (1997). Constrained and unconstrained movements involve different control strategies. Journal of Neurophysiology, 77(3), 1644–1650.
Nanayakkara, T., & Shadmehr, R. (2003). Saccade Adaptation in Response to Altered Arm Dynamics. Journal of Neurophysiology, 90(6), 4016–4021.
Wolpert, D. M., & Ghahramani, Z. (2000). Computational principles of movement neuroscience. Nature Neuroscience, 3(11s), 1212–1217.
Wolpert, D. M., Ghahramani, Z., & Jordan, M. I. (1995). An Internal Model for Sensorimotor Integration. Science, 269(5232), 1880–1882.